Flux Calibration
Jump to:
- Introduction
- Calibration Parameters
- Photometric Calibration Flags
- SDSS Mags to AB Mags
- SDSS Mags to fluxes
- QA Figures
Introduction
The objective of the photometric calibration process is to tie the SDSS imaging data to an AB magnitude system, and specifically to the “natural system” of the 2.5m telescope defined by the photon-weighted effective wavelengths of each combination of SDSS filter, CCD response, telescope transmission, and atmospheric transmission at a reference airmass of 1.3 as measured at APO (see transmission curves for SDSS 2.5m telescope).
Unlike DR6 and earlier data releases, which used a multi-stage process to calibrate the imaging data, the calibrations for SDSS-III involve two steps – determining the relative photometry over the entire survey using the ubercal algorithm, and fixing the zero points in each filter to match the DR6 photometry. Note that unlike DR7 which released both the ubercal and “Photometric Telescope (PT)” (pre-DR7) photometry, we are only releasing ubercalibrated photometry in DR8 (observations with the photometric telescope were discontinued in SDSS-III).
Ubercal is an algorithm to photometrically calibrate wide field optical imaging surveys, that simultaneously solves for the calibration parameters and relative stellar fluxes using overlapping observations. The algorithm decouples the problem of relative calibrations from that of absolute calibrations; the absolute calibration is reduced to determining a few numbers for the entire survey. We pay special attention to the spatial structure of the calibration errors, allowing one to isolate particular error modes in downstream analyses. Applying this to the Sloan Digital Sky Survey imaging data, we achieve ~1% relative calibration errors across 8500 sq. deg. in griz; the errors are ~2% for the u band. These errors are dominated by unmodeled atmospheric variations at Apache Point Observatory. For a detailed description of ubercal, please see the Ubercal paper (Padmanabhan et al., 2008, ApJ, 674, 1217).
The ubercal algorithm determines the relative photometry in each of the SDSS filters independently. We determine the five zeropoints by forcing the stellar aperture magnitudes of these data to agree on average with those in DR6. Comparisons between ubercalibrated and PT-calibrated magnitudes can be found in the ubercal paper.
We note that the ubercal algorithm is an intrinsically global algorithm. We therefore expect there to be differences between the calibrations presented in DR7, and those in this data release (due to the additional imaging data).
Calibration Parameters
The key parameter of the calibration for users is the conversion from counts (more precisely, ADU) into nanomaggies. We express this conversion factor as a single number per object per band, NMGYPERCOUNT. However, naturally this parameter is derived from the current atmospheric extinction, airmass, and flat-field values based on the parameters of a full photometric calibration solution for each run.
To perform this solution, the flux calibration assumes that the calibrated magnitude of an object m is related to its instrumental magnitude m0 by:
m = m0 + a – k(t)*x + f(i)
where a (the a-term) is a zero point, k (the k-term) describes the atmospheric extinction as a function of airmass x, and f is the flat field as a function of CCD column i (note that the SDSS flat fields are 1 dimensional, due to drift scanning). The a-terms are defined per camera column per night per filter. The k-terms are defined per night per filter, with a fixed linear time dependence (see the ubercal paper for details),
k(t) = k + (dk/dt)(t-tref)
where the reference time is assumed to be 0700 UT, and the time dependence of the k-terms (dk/dt) is fixed to the values below. The flat fields are defined per “season”, defined below.
| Filter | dk/dt (mag/airmass/10hr) |
|---|---|
| u | -0.012 |
| g | -0.007 |
| r | -0.010 |
| i | -0.012 |
| z | -0.022 |
| Flat field Season | Starting Run | Starting MJD | Comments |
|---|---|---|---|
| 1 | 1 | 51075 | 19-Sep-1998 |
| 2 | 205 | 51115 | 28-Oct-1998 |
| 3 | 725 | 51251 | 13-Mar-1999 |
| 4 | 941 | 51433 | 12-Sep-1999 |
| 5 | 1231 | 51606 | 03-Mar-2000 |
| 6 | 1659 | 51790 | 03-Sep-2000 (after i2 gain change) |
| 7 | 1869 | 51865 | 17-Nov-2000 (vacuum leak in Dec 2000) |
| 8 | 2121 | 51960 | 20-Feb-2001 (after vacuum fixed) |
| 9 | 2166 | 51980 | 12-Mar-2001 (Zeljko boundary) |
| 10 | 2504 | 52144 | 23-Aug-2001 (after camera tear-down) |
| 11 | 3311 | 52516 | 30-Aug-2002 (after camera tear-down) |
| 12 | 4069 | 52872 | 20-Aug-2003 (after summer shut-down) |
| 13 | 4792 | 53243 | 26-Aug-2004 (after summer shut-down) |
| 14 | 5528 | 53609 | 26-Aug-2005 (after summer shut-down) |
| 15 | 6245 | 53959 | 11-Aug-2006 (after summer shut-down) |
| 16 | 7642 | 54701 | 23-Aug-2008 (SDSS-III, after summer shut-down) |
| 17 | 8032 | 55090 | 16-Sep-2009 (SDSS-III yr 2, after summer shut-down) |
Photometric Calibration Flags
The photometric calibration status flags are detailed here; we describe their recommended usage here. Most users will want to restrict to PHOTOMETRIC data. If a user needs to use unphotometric data for some reason, there are four flavors to be aware of. The first, and best, is UNPHOT_OVERLAP – in this case, the unphotometric data overlaps photometric data, allowing a determination of the zero-point (a-term) on a field-by-field basis. For such data, the fluxes of objects should be correct on average, although the data could have larger than normal scatter. The next two UNPHOT_EXTRAP_CLEAR and UNPHOT_EXTRAP_CLOUDY are set when the data are assumed to be unphotometric and do not overlap any photometric data. In these cases, the ubercal algorithm extrapolates the solution from a clear (UNPHOT_EXTRAP_CLEAR, if available) or cloudy (UNPHOT_EXTRAP_CLOUDY) part of the night. Note that this is an extrapolation under unphotometric conditions, and there is no guarantee made on the data quality. The final class is UNPHOT_DISJOINT; this is set if the data are both spatially and temporally disjoint from the any survey data. In this case, even if the data may be photometric, the calibrations are set to an arbitrary default value and could have significant errors. Users should NOT treat these data as being calibrated.
Conversion from SDSS ugriz magnitudes to AB ugriz magnitudes
The SDSS photometry is intended to be on the AB system (Oke & Gunn 1983), by which a magnitude 0 object should have the same counts as a source of Fν = 3631 Jy. However, this is known not to be exactly true, such that the photometric zeropoints are slightly off the AB standard. We continue to work to pin down these shifts. Our present estimate, based on comparison to the STIS standards of Bohlin, Dickinson, & Calzetti (2001) and confirmed by SDSS photometry and spectroscopy of fainter hot white dwarfs, is that the u band zeropoint is in error by 0.04 mag, uAB = uSDSS – 0.04 mag, and that g, r, and i are close to AB. The z band zeropoint is not as certain at this time, but there is mild evidence that it may be shifted by about 0.02 mag in the sense zAB = zSDSS + 0.02 mag.
The large shift in the u band was expected because the adopted magnitude of the SDSS standard BD+17 in Fukugita et al. (1996) was computed at zero airmass, thereby making the assumed u response bluer than that of the USNO system response.
These statements are certainly not precise to better than 0.01 mag; in addition, they depend on the system response of the SDSS 2.5-meter, which was measured by Doi et al. (2010) and found to differ somewhat from the curves used to estimate the offsets just mentioned, and to probably be a function of time. They estimate the u-g change due to these differences to be at the 0.01 to 0.02 mag level.
Note that our relative photometry across the sky is quite a bit better than these numbers would imply; repeat observations and simulations of the ubercal pipeline show that our calibrations are about 1% in gri and about 2% in u and z.
Conversion from SDSS ugriz magnitudes to physical fluxes
As explained in the preceding section, the SDSS system is nearly an AB system. Assuming you know the correction from SDSS zeropoints to AB zeropoints (see above), you can turn the AB magnitudes into a flux density using the AB zeropoint flux density. The AB system is defined such that every filter has a zero-point flux density of 3631 Jy (1 Jy = 1 Jansky = 10-26 W Hz-1 m-2 = 10-23 erg s-1 Hz-1 cm-2).
To obtain a flux density from SDSS data, you need to work out f/f0 (e.g. from the asinh magnitudes in the photoObj files by using the inverse of the relations given on the magnitudes page). This number is then the also the object’s flux density, expressed as fraction of the AB zeropoint flux density. Therefore, the conversion to flux density is
S = 3631 Jy * f/f0
Then you need to apply the correction for the zeropoint offset between the SDSS system and the AB system. See the description of SDSS to AB conversion above.
QA Figures
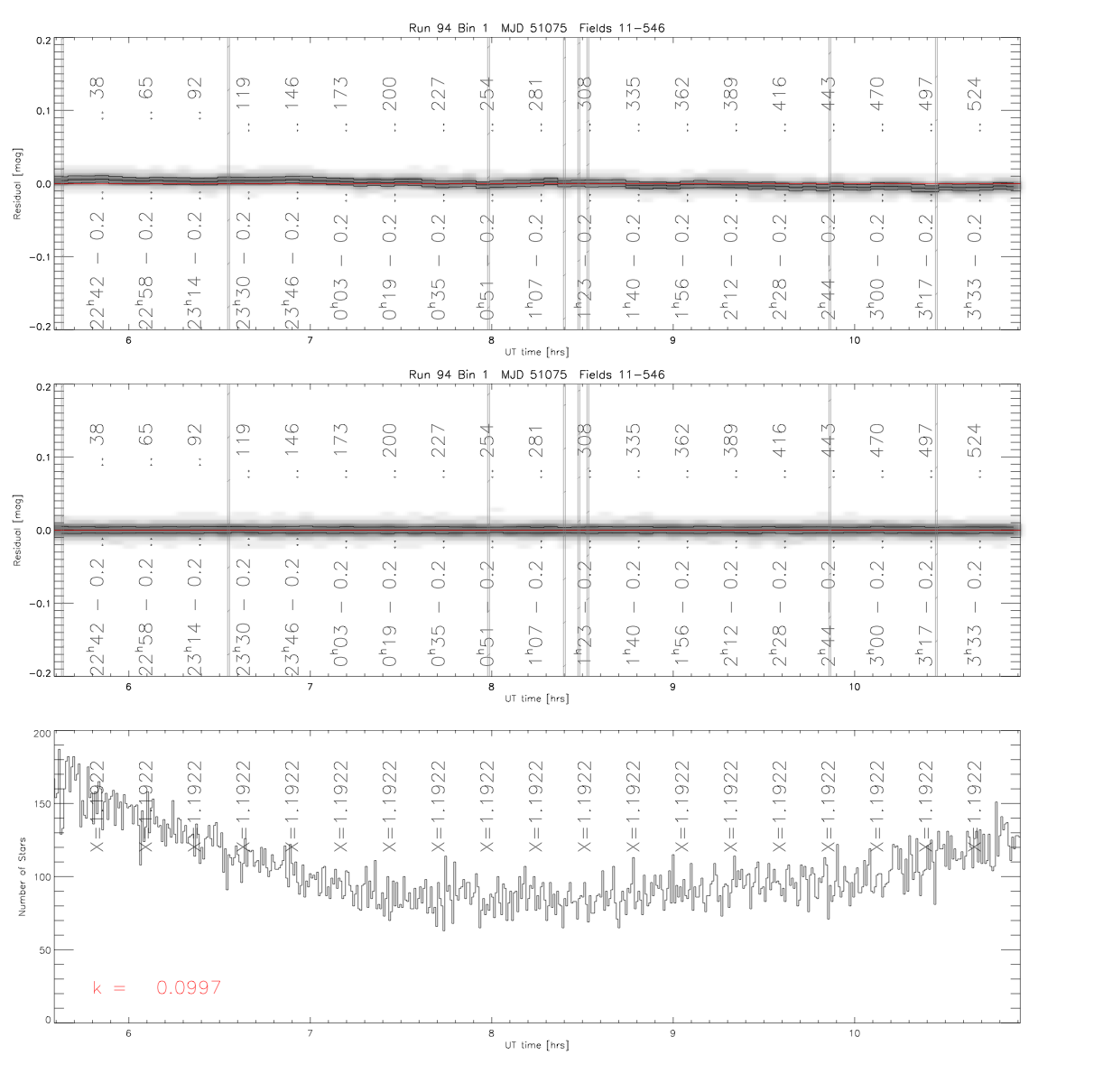
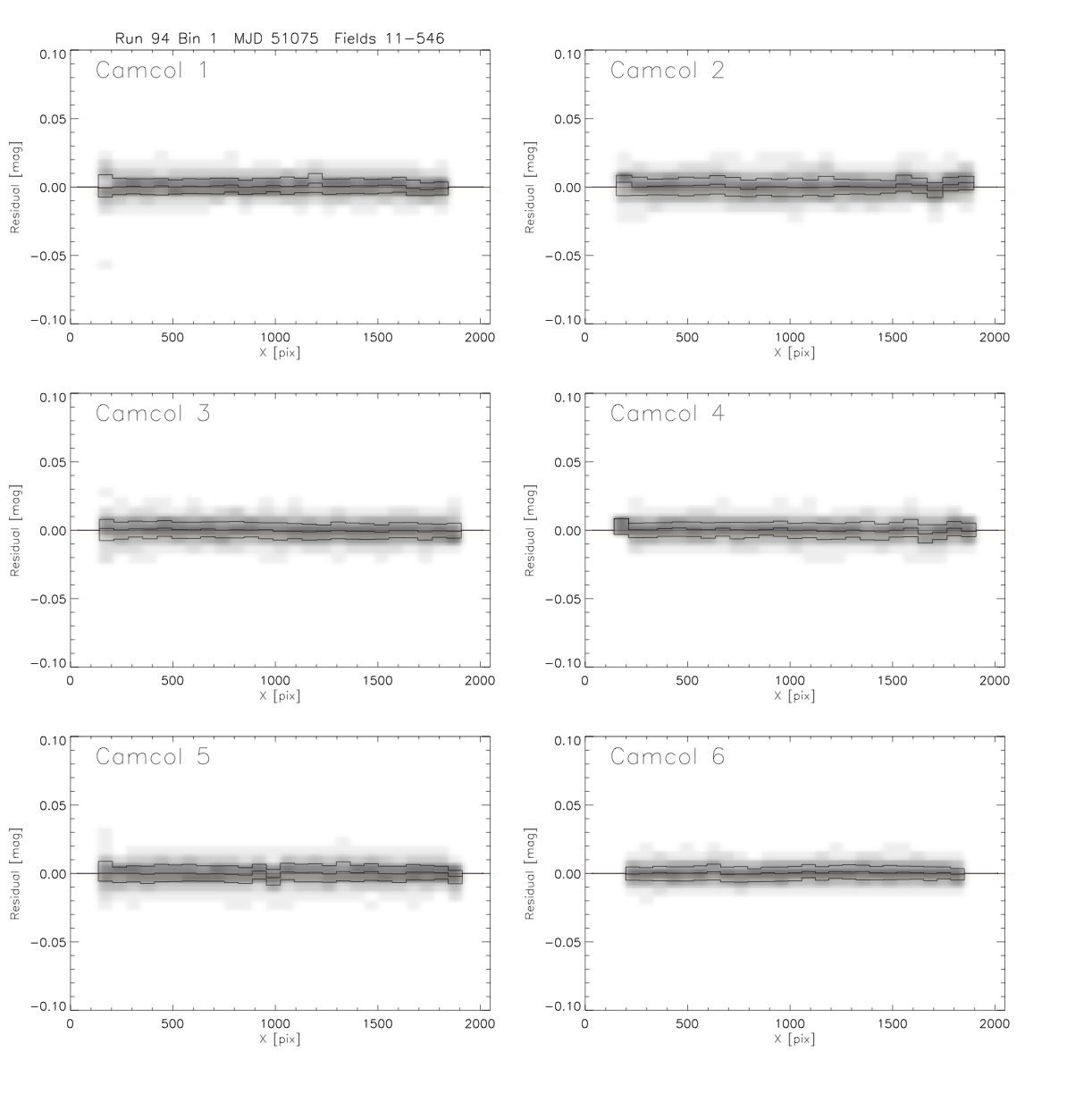
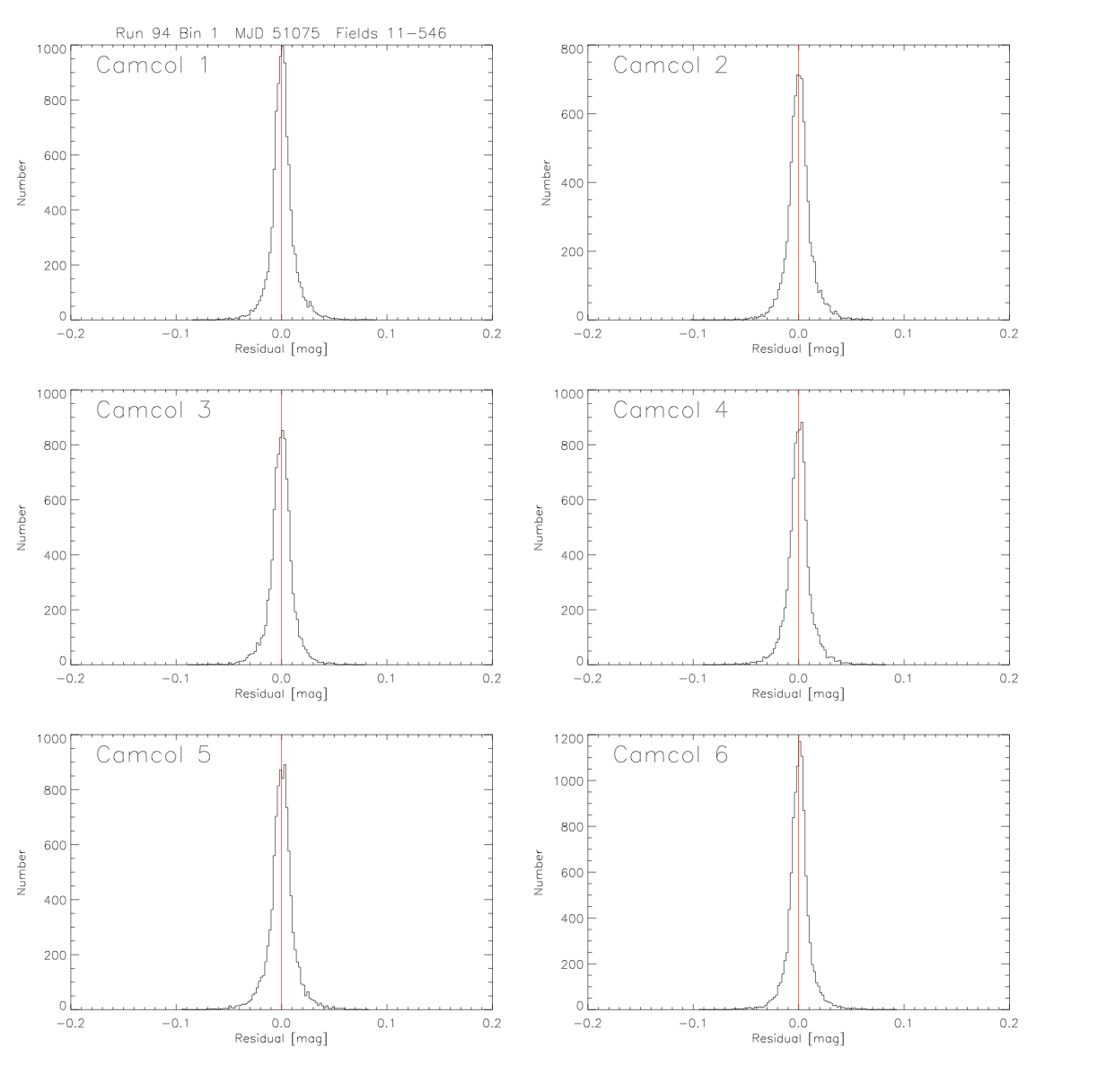
The calibration algorithm produces a series of QA plots that are used to validate the quality of the data. There are three pages produced per run per filter; the full list of figures is available on SAS, sorted by run and filter. An example (for Run 94 in the r band is shown below.
The naming convention for the QA figures is as follows:
calib-RRRRRR-F-type.png
where RRRRRR is the six-digit, zero-padded run number (e.g. ‘000094’), F is the filter ( u, g, r, i, or z), and type is one of run, flat or hist.
The run files summarize the photometric quality of all six camera columns combined as a function of field number (and time along the run). The top panel shows the residuals from the mean magnitudes of stars using the best fit photometric parameters, while the middle panel shows the same residuals with the mean trend removed. Also plotted are the 25%, 50% and 75% contours. These two figures will be the same for photometric runs, but will differ for unphotometric runs; the latter figure is a good indicator of the quality of UNPHOT_OVERLAP data. The bottom panel shows the number of stars used for calibration and the best fit k term value. Grey hashed regions mark areas where the imaging reductions had issues, while red hashed regions mark unphotometric fields.
The flat files shows the photometric residuals as a function of CCD column, for each of the camera columns, and tests the quality of the flat fields. The contours are the same as above.
The hist files show histograms of the photometric residuals for each of the six camera columns individually.