In the era of Fiber Positioning System (FPS) in SDSS, fibers are no longer plugged into plates to fix their position. Instead, a set of 2-arm robots each hold one APOGEE and one BOSS fiber, along with one back-illuminated fiber to track the robot position.
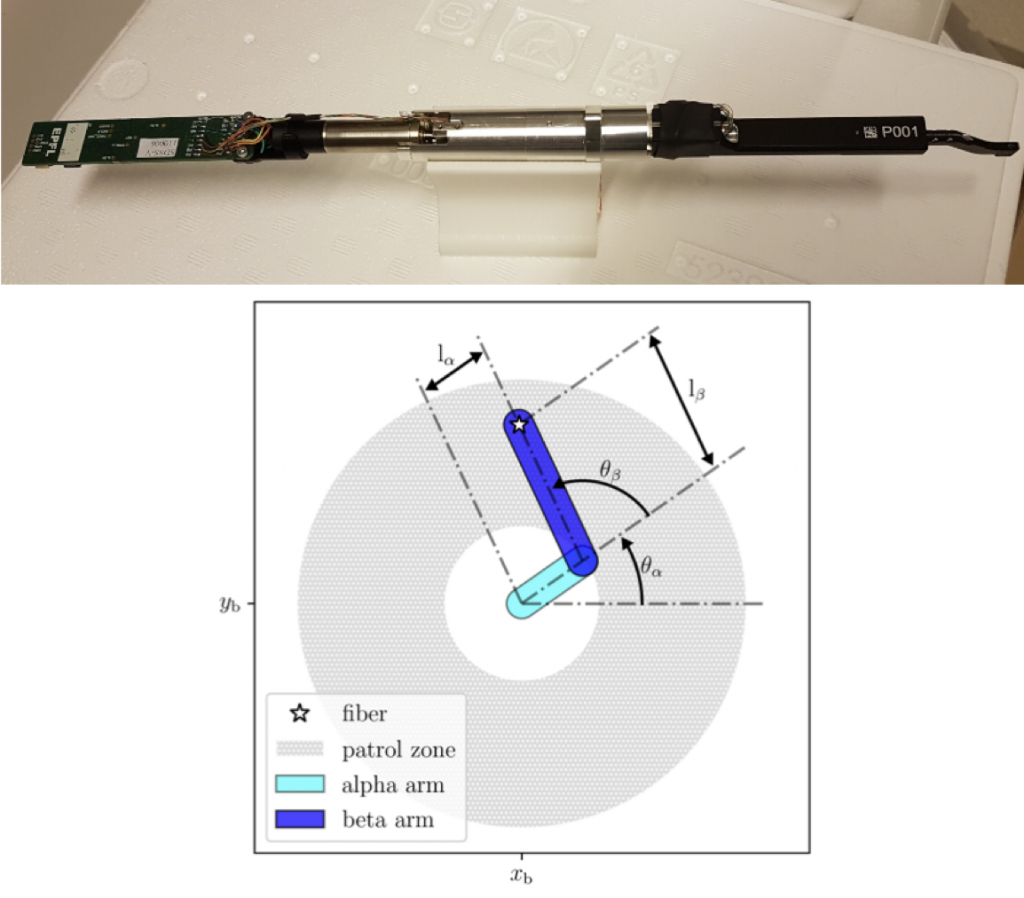
Fiber positioner (top) and its patrol area (bottom). Adapted from Sánchez-Gallego et al. 2020
Once the input tables have been cross-matched, and the scientific program groups have selected the targets for their cartons, we create our field observing plan, which periodically changes to account for information obtained from previous observations, changes in the carton versions, and instrumental requirements. This process starts with tiling the sky in a series of overlapping fields more or less evenly distributed along with a few special locations.
Then, to simplify survey planning we split our targets into a set of cadences (rhythms of observation) specific to a lunation using the following convention for the name:
{lunation}_{n_epochs}x{n_exposures_per_epoch}
Where:
lunation: “dark” or “bright“n_epochs: number of different epochs (roughly nights) desiredn_exposures_per_epoch: number of exposures per epoch
For example, if there is a set of stars to be observed at bright time at 12 different nights, and for each epoch we want to take 4 exposures, those targets will have a cadence of bright_12x4. For this purpose, an “exposure” means a single BOSS exposure taken simultaneously with 2 APOGEE exposures.
Then the robostrategy software (Blanton et al., submitted) determines the field cadences and the targets that should be observed at each exposure, respecting their observing constraints (the target cadences) and the total available time as a function of lunation and local sidereal time (LST). For each field/cadence combination we assign targets in order of priority. Then we choose the set of field/cadence pairs that maximize the targets observed in the survey given the observational constraints (target cadences, time available per LST/lunation)
The robostrategy survey plan is simulated using the observesim product, optimizing the scheduling strategy and allowing scientists to estimate when particular targets will be observed. The survey plan is loaded to a targeting database with the help of the mugatu product. At each observatory, a web based application named kronos is used to run the optimized scheduling algorithm, roboscheduler, and plan observations each night.
See Sky Calibration and Standard Calibration for descriptions on how sky fields and standard stars were selected for observations.